Allegro ATS344LSP 磁反向偏置差分线性传感器 IC 的应用和优势
作者:Yannick Vuillermet、
Allegro MicroSystems Europe Ltd
介绍
本应用注释旨在深入了解 Allegro ATS344LSP 反向偏置差分线性传感器 IC 的典型应用。这种传感器的主要应用是测量线性运动,如轴的轴向位移。
为了正确使用,此传感器必须与设计良好的移动铁磁靶相关联。反向偏置布置和差分感测技术需要特定的靶形状来产生有用的磁信号。
ATS344LSP 包含双线输出接口,并在封装中集成了旁路电容,使其适用于分散式传感(通常用于汽车),无需使用印刷电路板。
与通常用于线性位置测量的磁性传感器相比,ATS344LSP 具有独特的性能优势。
下面的应用注释描述了 ATS344LSP 传感原理,介绍了其磁性配置的优点,并给出了典型的用户应用。
ATS344LSP 测量原理
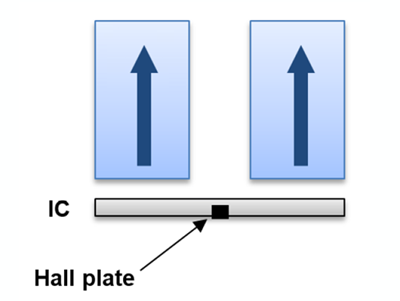
ATS344LSP 在一个封装中包含两个霍尔板 HP1 和 HP2,彼此间隔 3 mm,并在这些传感元件后面安装稀土磁体(见图 1)。
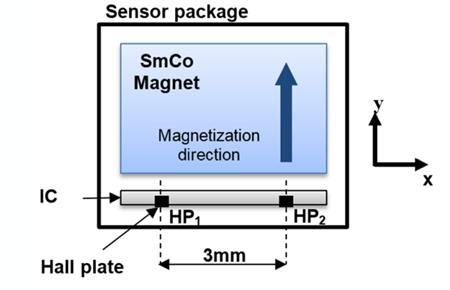
磁体沿 y 轴磁化,两个霍尔板都测量沿 y 轴的磁场强度。传感器测量差分场 ΔB = B2 – B1。B2 是由 HP2 测量的磁场,B1 是由 HP1 测量的磁场。
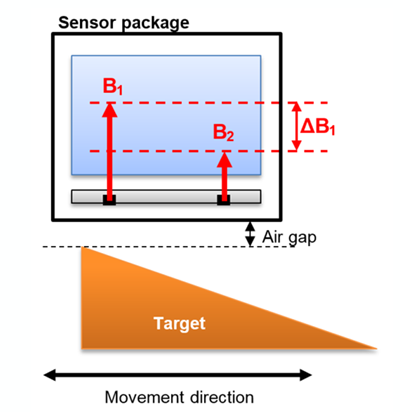
在图 2 中,ATS344LSP 传感器布置在基础铁磁靶前面。需要提醒的是,铁磁材料是放置在外部磁场中时被磁化的材料。铁磁材料也往往集中局部磁力线。大多数钢铁都是铁磁性的。
在这种情况下,由于存在传感器反向偏置磁体,所以靶需要磁化。该靶磁化产生自己的磁场,该磁场由两个霍尔板 HP1 和 HP2 感应。
两个霍尔板也会感测来自磁体的背景磁场(称为磁基线)。然而,在理想的情况下,最好是在差分操作期间减去磁基线场。
由于图 2 中的靶体形状,霍尔板 1 感应的磁场
大于霍尔板 2:差分磁场 ΔB1 = B2 – B1 为负并且较大。
在下文中,气隙定义为靶到传感器的最近点与传感器封装面之间的距离(参见图 2)。
前部基本原理 - 大差分场
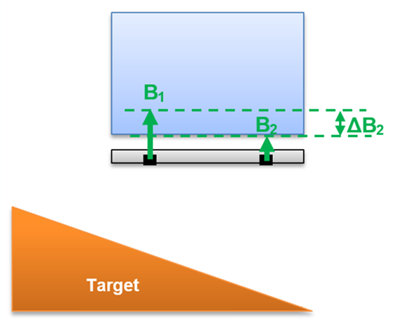
如图 3 所示,当靶移动到左侧,差分场 ΔB2 依然为负,但 B1 和 B2 的差值小得多。这种差分磁场变化的原因是单个霍尔板上测量的磁场水平与传感器到靶的距离之间的非线性关系。
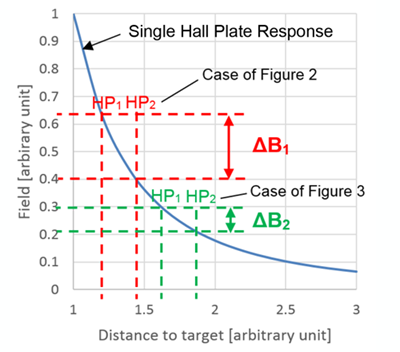
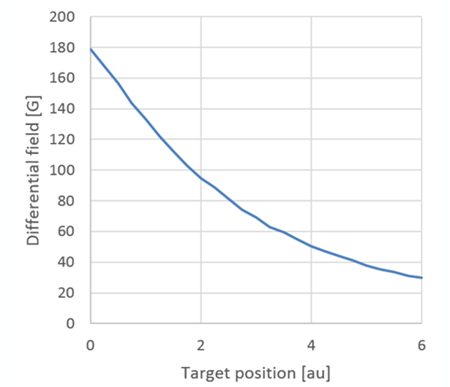
图 4 是该非线性函数,它显示了单个霍尔板感测场的典型表现(任意单位),并且是基于该霍尔板和铁磁靶之间的距离。这个图还用红色表示图 2 的情况,用绿色表示图 3 的情况。
靶前方的基本原理 - 小差分场
靶距离
因此,ATS344LSP 感测的差分场 ΔB 是直接测量靶唯一位置的结果(图 5)。
- 基于图 2 系统
ATS344LSP 与其他磁场布置相比的优势
ATS344LSP 为测量线性位移提供了独特而有利的方法。下面介绍测量线性位移的其他常用技术。
第一种常用技术是使用与零高斯(或 0G)环形磁体(图 6)相关的单场测量(例如单个霍尔板)。零高斯磁体
是指在霍尔板位置没有磁场的磁体(即磁基线为零)。环形磁体也沿 y 轴被磁化。
零高斯磁体与单个霍尔板 IC 一起使用,
以限制温度变化导致的传感器不精确(例如,相比 20°C,SmCo 稀土磁体磁场强度在 150°C 时会降低 4% 左右)。非零高斯的磁体将具有高的基线磁场,并且该磁场随温度的变化难以补偿。
例如,针对这些类型的线性位移测量,对应的 Allegro IC 是 ATS341LSE。
由这种零高斯系统的霍尔板感测的场是传感器与移动的铁磁体靶之间距离的非线性测量结果:越接近靶,磁场
越强。图 4 显示了传感器响应。
0 G 布置的主要优势是简化概念。缺点主要是 0G 磁体昂贵(与矩形磁铁相比)
,以及对外部扰动磁场比较敏感,单个霍尔板能直接感测任何外部场扰动。请注意,通常还需要在应用中校准这种类型的传感器,以补偿实际安装气隙的变化。
单霍尔板测量的横截面图
测量线性位移的第二种常用技术是使用安装在要感测移动对象上的永磁体以及相关传感器,该传感器能够测量由该磁体
产生磁场角度。
图 7 说明了这个原理:移动磁体沿 x 轴磁化。测量磁场角度 β,并且直接测量磁体位置。
有关此原理的更多信息可以在 Allegro 应用注释中找到:Allegro 网站提供“使用角度传感器 IC 的线性位置感测”。例如,针对这些类型的线性位移测量,对应的 Allegro IC 是 A1335。
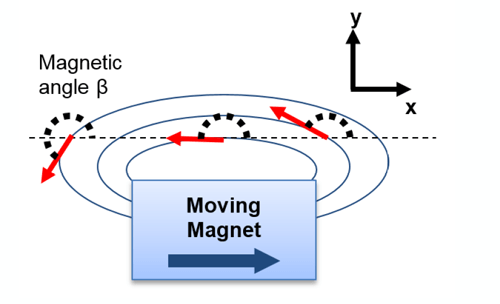
图 7 中的配置对气隙变化敏感度低,根据磁体设计,这是本应用注释描述的唯一能够达到
大气隙 (>4 mm) 和长行程距离 (>10 mm) 的技术。
这种配置的主要缺点是需要将磁体安装在系统中要感测的运动对象上。磁体安装过程很昂贵,并且
磁体有可能偏离目标。
此外,磁角度测量对外扰动磁场敏感。
由于 ATS344LSP 采用差分检测原理,该 IC 对外部磁场扰动几乎不敏感。IC 使用的差分处理电路自然去除两个霍尔板(即共模场)上的类似扰动。ATS344LSP 对两个霍尔板上的不同干扰都保持敏感。例如,与 SP 封装引线平行的导线距离传感器 40 mm,电流 500 A,将产生 2 G 的差分响应,并将在传感器输出中检测到。但请注意,在这种情况下,单个或二维现场测量会感测到 25 G 的变化。
ATS344LSP 的差分测量技术还允许使用简单且低成本的矩形磁体,而不是复杂且昂贵的零高斯磁体。可以使用更简单的磁体,因为磁基线由 ATS344LSP 的差分计算去除。
使用铁磁靶和带有集成反向偏置磁体的 IC 具有许多优点,还有必须权衡的因素。需要权衡的主要因素与
工作气隙极限和 IC 线性位移感测范围有关。这些参数受到 Allegro SP 封装集成磁体尺寸的限制。对于 SP 封装,
典型最大气隙大约为 2 mm,最大检测范围大约为 10 mm。如果使用移动磁体技术,气隙极限和行程范围可以大得多,但要使用非常大的昂贵磁体,并且对外部扰动场的抗扰度降低。
在一些应用中,要被感测的运动物体是将线性偏移并可能绕其轴线旋转的轴。在这种情况下,移动磁体法需要覆盖轴的
整个圆周的磁铁。这也需要使用尺寸巨大的昂贵磁体。
如已经讨论的那样,与安装分离磁体相比,使用 ATS344LSP 和钢靶测量线性位移通常更容易且更便宜。
表 1:线性位移测量 不同应用架构的比较
| 0 G 背向偏置 和单独 测量 (ATS341LSE) | 移动磁体 磁场角度 测量 (A1335) | ATS344LSP 背向偏移 差分 测量 | |
| 最大气隙 [mm] | ≈2 | >4* | ≈2 |
| 典型行程 长度 [mm] | ≈10 | 取决于 移动磁体 最大数十 毫米* | ≈10 |
| 典型 精度 | 中 | 高* | 中 |
| 应用 内部 校准 | 已推荐 | 可避免 | 已推荐 |
| 不受 外部 扰动磁场的影响 | 低 | 低 | 高 |
| 磁体 | 集成 复杂形状 | 取决于 应用 | 集成 简单形状 |
| 靶 | 铁磁体 | 永 磁体 | 铁磁体 |
| 靶 安装 | 容易 | 困难 | 容易 |
* 具有良好的气隙性能、宽范围和/或高精度总是需要使用大尺寸的昂贵移动磁体。
表 1 中的数据只是典型值。有关特定应用的更多详细信息,请联系当地的 Allegro 工程师。
典型应用范例
请注意,以下所有结果均来自模拟,可能与实际结果略有不同。
在这个例子中,目标是确定一个靶位置(图 8)。靶沿 x 轴移动。
为了说明 ATS344LSP 传感器的性能,请考虑具有以下要求的典型应用:
- 静态气隙:1.35 ±0.45 mm
- 动态气隙: ±0.05 mm
- 温度范围:–40 至 150°C
- 行程范围 R:10 mm
- 用户在直线行程的终点进行 2 点校准:预期在这些位置上的 10/90% PWM 输出
为了获得合适的输入场范围,使用 V 形靶,它能在 ATS344LSP 传感器上产生双极差分场。
如前所述,磁场不随应用气隙线性减小(图 4)。因此,使用直 V 形靶(图 9)将固有地导致
非线性差分传感器输出和精度误差。该误差称为目标固有非线性。

但是,目标形状优化可以补偿这种固有的非线性。实际上,磁场在小气隙情况下下降得很快,而在大气隙时下降慢得多。因此,在 V 形中间(即霍尔板实际感测到大气隙的地方)设置较大斜率的靶可以补偿非线性磁场行为。
合适的靶设计还必须考虑其他应用参数(例如动态气隙变化)和传感器 IC 误差(偏移随温度漂移,灵敏
度随温度变化等)。
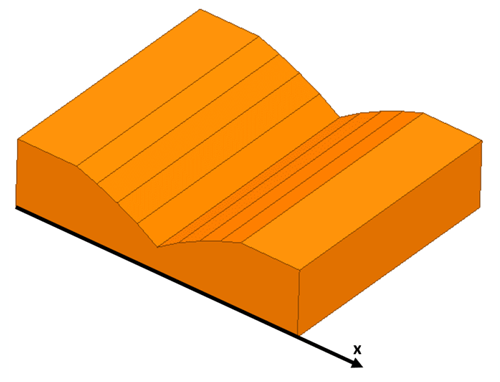
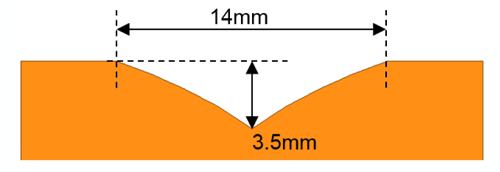
图 10 显示了应用实例最佳靶横截面图。选择L 14 mm 的靶长度不仅适合行程范围和两个霍尔板
之间的距离 (3 mm),而且还考虑了有关 V 形端点的裕度。为了避免在 V 形区域以外平坦区域出现错误测量,需要该裕度。此处已考虑 1 mm 裕度。然后用以下公式得出靶长度 L:
L ≥ R + 4 mm
对于 V 形高度,推荐使用 2 - 4 mm 之间的值(图 10 中显示的是 3.5 mm)。高度小于 2 mm 会产生很小的差分场,从而导致
更高的位置误差。高度大于 4mm 不会显著增加磁场,因为铁磁材料离传感器太远。
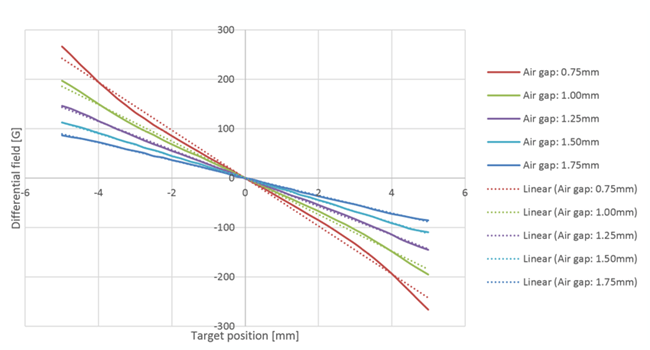
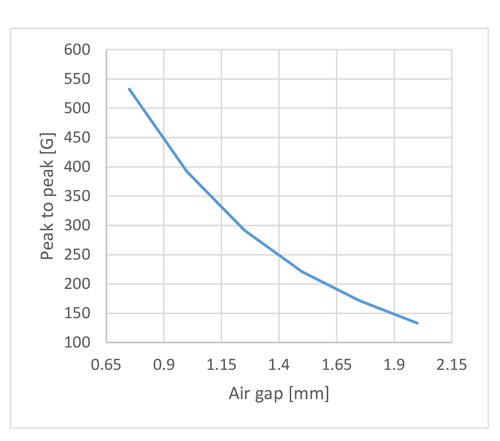
图 11 显示了 ATS344LSP 传感器在此最优靶前面感测到的差分场(相比靶轴线位置和气隙)。可以看出,差分场在标称应用气隙 (1.35 mm) 和大气隙处是线性的,但是在小气隙处显著偏离。这是特意安排:在小气隙情况下,传感器感测到的差分场要高得多(图 12),这使得传感器对测量误差(主要是 IC 偏移漂移)的敏感性大大降低。因此,为了在小气隙和较大气隙处获得类似的精度性能,必须有所折中。在气隙较小的情况下,误差主要来自内在的目标非线性,而在大气隙下,误差主要来自传感器测量误差。
全程气隙关系
现在,将评估此应用示例所需的准确度。为了获得实际值,进行了蒙特卡罗统计分析。在这个模拟中,根据统计分布规律,我们为各种应用参数的数千个实际案例进行建模(例如,安装气隙和传感器偏移误差)。对于每种案例,都要评估传感器的输出精度。
给出的结果对于整个 IC 温度范围有效,并且包括传感器寿命漂移。这里报告的误差是全范围靶位移的最大位置误差。
使用寿命期间考虑的偏移漂移为 ±12G(根据在类似产品上执行的降低温度循环测试;该数字将通过以后的 ATS344LSP 测试来确认)。
为了进行蒙特卡罗分析,假定以下机械分布:
| 参数 | 分布 | 平均值 [mm] | 标准 偏差 [mm] |
| 安装 气隙 | 高斯 | 1.35 | 0.15 |
| 最大动态 气隙 | 高斯; 仅保留 正值 | 0 | 0.05/3 |
图 13 显示了评估的所有模拟案例在整个行程范围内的最大位置误差分布,误差包括安装气隙、动态气隙变化、温度变化、传感器误差和目标固有非线性度。传感器误差包括温度导致的偏移和灵敏度漂移、偏移和灵敏度寿命漂移、传感器分辨率和非线性度。请注意,% FS(满量程百分比)代表完整线性行程范围的百分比。
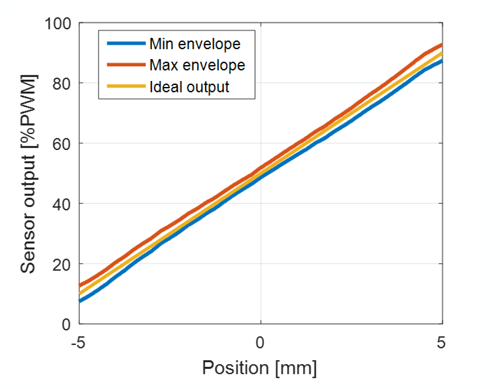
在应用安装后,对传感器进行校准,使得行程范围的第一端返回 10% 的 PWM,第二端返回 90% 的PWM(参见图 14)。
平均误差约为 4.9%FS,标准偏差约为 1.3%FS。从误差分布分析看来,约 3000ppm 的样本具有大于 9.4% FS 或 0.94mm 的最大误差。
尽管没有执行输出线性化来补偿内在目标非线性度,但是传感器的最终精度是相当好的。
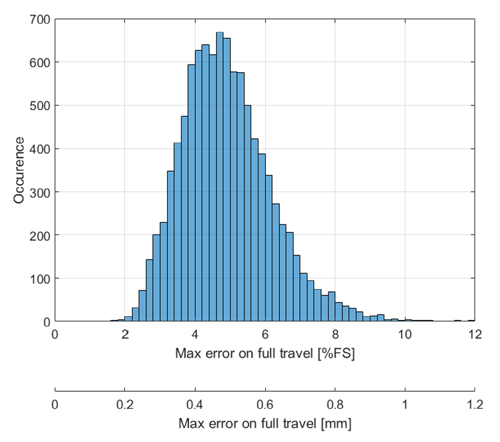
图 14 显示了对于一个随机模拟情况,相对于所有变化的参数,传感器输出的预期包络。
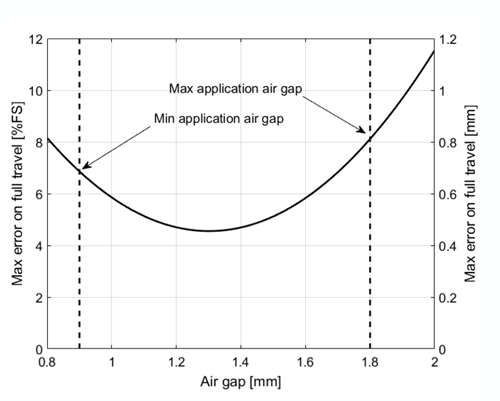
图 15 是典型测量误差与安装气隙的关系如预期,最小误差在标称气隙附近,曲线相对于安装气隙范围(0.9-1.8mm)
近似对称。
结论
Allegro Microsystems ATS344LSP 磁性偏置差分线性传感器 IC 在测量目标或轴的直线行程位置时具有独特的优势。与传统的零高斯反向偏置线性 IC 或磁性角度传感器 IC 相比,ATS344LSP 的优势如下:
- 无需客户系统提供磁体
- 轻松集成铁磁靶
- 对外部扰动场敏感度极低
因此,ATS344LSP 推荐用于:
- 恶劣磁场环境
- 简化靶安装(降低成本)
- 改善应用靶固定的机械可靠性。
要深入了解 ATS344LSP 在具体应用中的性能表现,请联系当地 Allegro 应用工程师。