数字式位置传感器 IC - 连续时间与稳定斩波交叉参考指南
作者:Joseph Hollins,
Allegro MicroSystems
介绍
Allegro 可提供多样化的数字式位置传感器,包括霍尔效应开关、锁存器和其他特殊用途的器件。随着时间推移和不断创新,这些霍尔器件的基本结构已经从它的原始形态(连续时间)发展到如今现代化的稳定斩波器件。
此应用指南将概述两种传感器类型之间的差异,并为系统设计人员提供所需工具,以便其根据系统选择合适的传感器。同时会提供一份交叉参考表,总结出升级连续时间器件至稳定斩波器件时,建议使用的更换器件。

稳定斩波器件与连续时间器件的区别
通常,与连续时间器件相比,稳定斩波器件具有更优越的温度稳定性,物理应力耐受能力(低开关点漂移)以及更简化的生产流程。由于无需校准和更加现代化的晶圆制造工艺使用,稳定斩波器件还有晶片尺寸小的优点。其时域性能会出现轻微平衡,但在大多实际应用中可忽略不计。图 1 每种类型 Allegro 典型器件差异总结。
Allegro 的最新传感器产品都是斩波稳定型。我们推荐在所有设计中都采用稳定斩波器件。连续时间器件具有的较短响应时间和振动逐步降低特性在普通应用中意义不大。连续时间器件仍在保持生产中,但只在一些特定应用中推荐使用。在这些应用中,目标具有高移速,或为达到超低能耗(最大化电池寿命)而计划加快传感器电循环,或为最小化自身产热。在时域行为的差异如下量化。
即使在这些特殊情况中,在应用条件一定时,连续时间器件的时域性能也难以超越稳定斩波器件的优点。
表 1:稳定斩波传感器与连续时间传感器
| 参数 | 稳定斩波 | 连续负载: |
| 磁开关点阈值? | 是 |
是 |
| 普通封装 | SOT23 (LH)、SIP-3 (UA), SIP-3 with passives (UC) | SOT23 (LH)、SIP-3 (UA) |
| 信道 | 复杂化 | 简易化 |
| 霍尔板配置 | 单个、双个或多个 | 单 |
| 霍尔板偏置 | 交换(“斩波”) | 恒定 |
| Allegro 生产中是否需要校准? |
否 | 是 |
| BOP/RP 温度稳定 | 最佳 | 良好 |
| 物理应力耐受能力 | 最佳 | 良好 |
| 通电时间 | 短 | 最短 |
| 最高工作频率 | 高 | 最高 |
| 输出重复 / 抖动 | 良好 | 良好 |
| fC 振荡器? | 是 | 否 |
| 典型电路旁路 * | 0.1 μF | 0.01 μF |
| 是否同意所有应用推荐? | 是 / 全部 | 只选择特殊情况 |
* 请参考器件数据表获取具体建议和指导方案。
连续时间
 |
 |
 |
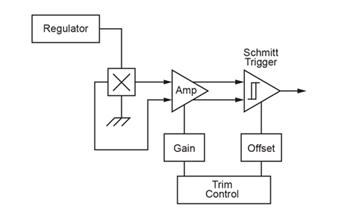
连续时间工作的传感器只有一个穿过霍尔元件的电流方向,且此方向偏置电流恒定。由此可最大限度缩短外部应用磁场和电流输出的响应时间。这对于需要快速输出响应时间应用的好处不言而喻。
磁偏移随环境条件而变化,其也会影响霍尔开关阈值稳定性(工作和释放阈值,分别称为 BOP and BRP)。连续时间器件没有内置电路消除偏移。这会体现在所给器件数据表的详述中:与斩波器件相比,连续时间器件的具体 BOP 和 BRP 范围更广。
稳定斩波
在霍尔效应应用时,由霍尔元件引起的小信号电压会限制开关精度。信号电压会随着霍尔元件输出时产生的偏移而或大或小的减少。这使得它难以精确地在指定工作温度和工作电压范围内处理磁信号。
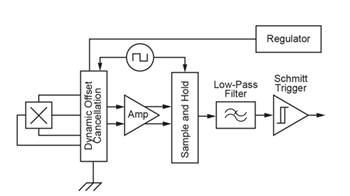
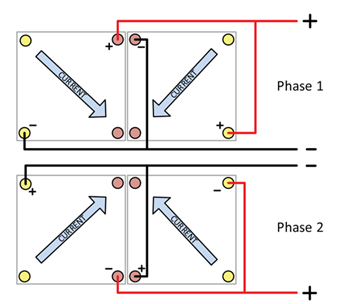
稳定斩波可用于最小化霍尔元件产生的偏移。Allegro 专利技术,正交动态偏移消除(美国 专利号 No. 5621319, 1997 ),可消除由热应力和机械应力导致的输出偏移和漂移主要源头。该偏移稳定技术以信号调制 / 解调过程为基础。在信号调制过程,不需要的偏移信号在频域中与磁诱导信号分离。磁信号后续解调充当偏移调制,导致磁诱导信号在基带恢复其初频谱,而 DC 偏移变成一个高频信号。之后,磁信号可通过一个低通滤波器,而 DC 偏移被阻拦。图 3 显示了此信号链结构。虽然信号链看似比连续时间器件更加复杂,但其没有校准控制模块,因为其不需要。这便节省了芯片面积和生产校准时间。图 4 显示了可移除偏移的交变霍尔元件偏置
大多情况下,Allegro 稳定斩波可具有 800 kHz 的时钟频率。解调处理中使用采用保持技术,其中采样在两倍斩波频率下进行。高工作频率造就更高总采样率。
受热应力和机械应力影响,动态正交偏移消除会使芯片脱敏,进而造就温度循环变化后,极稳定的静态霍尔电压输出和精确恢复。Allegro 在其专利 BiCMOS 晶圆制造过程中使用了这一技术,由此便可使得低偏移、低噪音放大器与高密度逻辑及采样保持电路协同使用。
输出响应时间(传播延迟)和时域重复性(抖动)受稳定斩波影响轻微。然而, Allegro 高频斩波方式可最小化此影响,使其在大多应用中微乎其微。连续切换霍尔
元件的偏置电流可产生短暂、周期性中断的偏置电流。这些扰动可能会在器件电源引脚处出现,进而需要一个较大的推荐旁路电容。
表 2 :一般通电时间, tPO,
B = –50 G,TA = 25°C
| 参数 | 连续时间 (A1201) |
稳定斩波 (A1220) |
| tPO | 1.94 μs | 10.12 μs |
性能
性能数据(表 2)仅仅是为了举例说明,数据收集由两个 Allegro 数字位置传感器 IC 完成,分别是 A1220 (稳定斩波)和 A1201(连续时间)。
通电时间
数字位置传感器的通电时间特征由可测量电源到达指定最低工作电压和有效状态输出之间的时间延迟决定。响应外部磁场时生成一个输出边缘,使用的磁感应强度 (B)= BRP(MIN) – 10 G。(一般来说,使用
磁场越大,观察的通电时间越短。)
连续时间器件的较短通电时间优势可应用于传感器的快速供能循环,这是为了获得超低功耗(最大化电池寿命)或最小化自身产热。传感器必须供电才可产生有效输出的总时间减少,进而获得
更短工作周期、更小平均功耗和更少自产热。

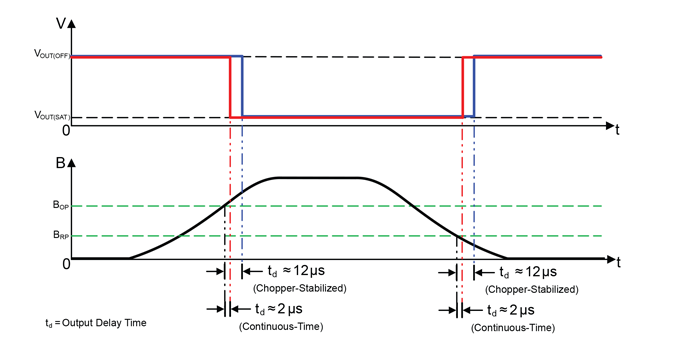
输出响应时间
从磁信号边缘到输出边缘可测得响应时间。施加磁场将比斩波稳定器件更快通过较简单的连续时间信路。然而,稳定斩波器件响应时间仍保持在 12μs 内(参阅图 6 )。
表 3:普通输出响应时间,td,
环境温度 (TA) = 25°C
| 参数 * | 设备 | 斩波 稳定 |
连续 时间 |
| td | –150 G 输出停止 |
11.4 μs | 2.0 μs |
| 150 G 输出开始 |
9.9 μs | 1.8 μs |
对于工作频率很高的应用而言,输出响应时间很重要。除受信路带宽影响外,最大支持工作频率和输出响应时间直接相关。
连续时间器件磁场响应时间通常在 2 μs 内,由此,理论工作频率可达 250 kHz(按每周期输出两次计算)。稳定斩波器件磁场响应时间通常在 11.4 μs 内,理论支持工作频率可达近 44 kHz。虽然这对于连续时间器件是 6:1 的优势,但两种器件的绝对延迟时间都极小,这在大多数实际应用都不是决定因素。两种器件的最大实际工作频率都受限于信道带宽。
在环形磁铁极对数、目标转速和器件工作频率,f 之间存在一个重要关系。关系如图 7 所示,并由以下公式体现:
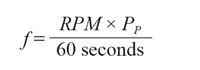
在这个表达式中,目标转速 RPM,和目标极对数,PP 决定了霍尔效应传感器的有效工作频率。
抖动
对连续磁输入信号而言,传感器输出重复性(抖动)由信噪比和刷新率决定(如稳定斩波)。电子器件产生的恒定霍尔信号伴随的延迟可忽略不计。斩波稳定器件在输出刷新前需要两次或多次的霍尔信号采集。这可导致磁信号转换相对于斩波稳定阶段校准时的输出信号抖动。
例如,与 800 kHz 斩波频率和一个装置 4× 斩波(从各霍尔元件的四个角的驱动电流)将刷新的速率输出状态:

图 7 包括环形磁铁极对数和合成磁极对频率的几次采样。如图所示,目标速度一定时,高密度环形磁铁会增加其工作频率。但是,所有频率都在 Allegro 霍尔技术检测范围之内。

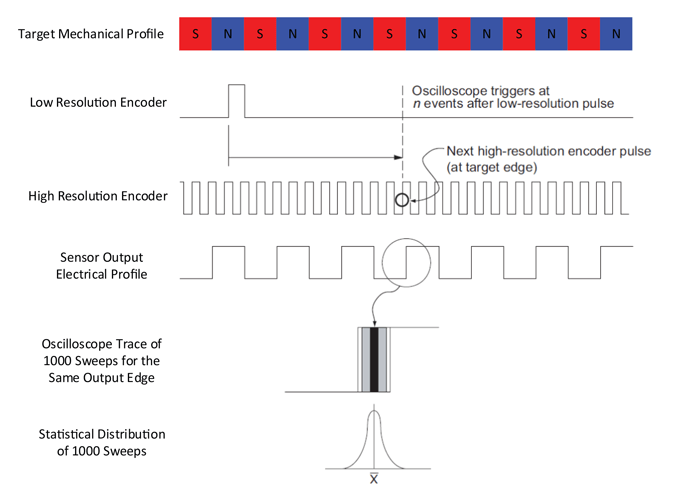
200 kHz 速率相当于每 5 μs 刷新一次,若施加在其余部分信路导致的延迟上,会导致普通的稳定斩波器件出现 6 至 12 μs 的总传播延迟。
以下是重复性与温度的对应关系(见图 9),其体现出两种类型传感器表现出了相似的实际性能。所示数据是使用直径 100mm 的极对 60 环形磁材得出的典型 6-Sigma 边缘重复性结果。x 轴上 BPkPk 表示输入磁场的大小。图 8 例子显示了为量化重复性的测量方式。以此方式测量重复性时,数值越小表示性能越好,如更低抖动。图 10 说明了目标速度变化时,重复性保持稳定。
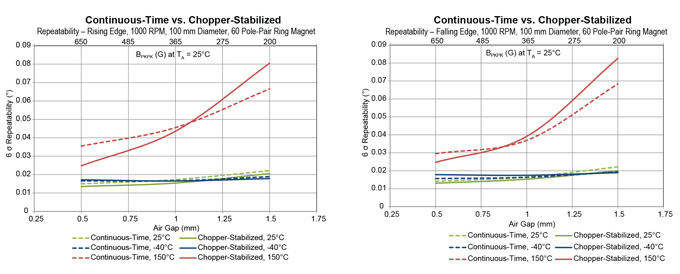
连续时间器件和斩波稳定器件1000 RPM 三温重复性比较
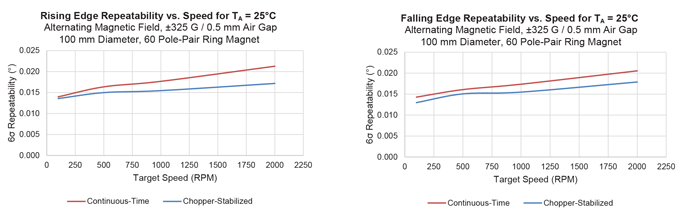
连续时间器件和斩波稳定器件重复性与速度比较
温度对重复性影响最大。其他影响因素包括磁场强度、连续性和目标速度。然而,对连续时间器件和稳定斩波器件而言,边缘重复性慢速上升和下降时只是略优于更高工作速度的状态。
温度稳定性
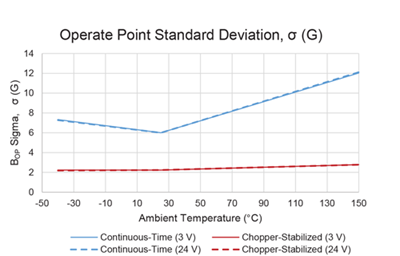 工作点温度稳定性 |
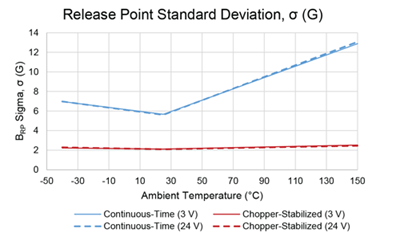 释放点温度稳定性 |
稳定斩波器件在提供温度稳定性方面优于连续时间器件。感应某些磁材,如铁氧体,会出现磁场强度随温度发生漂移的情况。除非试图追踪给定目标的温漂,磁开关阈值在所有温度中仍可以很好的保持不变并保持在预计磁场输入范围内。
稳定斩波可提供更好的温度稳定性。由于稳定斩波产生的平均能力和偏移消除,开关阈值变化被降至最小。相邻图表数据(图 11 和 图 12)总结了连续时间器件和稳定斩波器件普通磁开关阈值参数的标准差。
本例中,连续时间器件的标准差一般都比稳定斩波器件的标准差大 3 倍。
连续时间器件受升温影响巨大,导致开关阈值变化比相应的稳定斩波器件最高大 5 倍。这会导致边缘位置(校准)准确率下降,也可能会需要从目标和/或更小的气
隙磁场中获取更高的磁场。
样品磁开关阈值参数的标准差数据如下所示(表 4)。不同工作电压对标准差的影响可忽略不计。
表 4:开关阈值数据标准差
| 数据表 参数 |
安装 | 磁阈值参数标准差,σ (G) | |||||
| TA = –40°C | TA = 25°C | TA = 150°C |
|||||
| 斩波 稳定 |
连续 时间 |
斩波 稳定 |
连续 时间 |
斩波 稳定 |
连续 时间 |
||
| 工作点, BOP |
VCC = 3 V | 2.24 | 7.33 | 2.23 | 6.01 | 2.78 | 12.03 |
| VCC = 24 V | 2.19 | 7.28 | 2.24 | 6.00 | 2.78 | 12.12 | |
| 释放点, BRP |
VCC = 3 V | 2.23 | 6.97 | 2.12 | 5.67 | 2.52 | 12.88 |
| VCC = 24 V | 2.29 | 6.97 | 2.09 | 5.61 | 2.45 | 13.07 | |
| 滞后, BHYS |
VCC = 3 V | 1.89 | 2.83 | 2.61 | 2.36 | 1.87 | 2.59 |
| VCC = 24 V | 1.87 | 2.72 | 2.64 | 2.44 | 1.72 | 2.68 | |
交叉参考表
所有应用都推荐使用稳定斩波器件。决定将已有连续时间器件替换为最合适的稳定斩波器件时,下表可作为遵循指南。
表 5:连续时间与稳定斩波交叉参考
 |
器件类型 |
零件号 | BOP (max) | BRP (min) | BHYS | 稳定斩波替代 |
| 单极 开关 |
A1101 | 175 | 10 | 80 | A1121 | |
| A1102 | 245 | 60 | 80 | A1122 | ||
| A1103 | 355 | 150 | 80 | A1123 | ||
| A1104 | 450 | 35 | 80 | A1121 或 A1128 | ||
| A1106 | 430 | 160 | 140 | A1123 或 A1128 | ||
| 双极 开关 |
A1201 | 50 | -50 | 55 | APS12200 或 A1250 | |
| A1202 | 75 | -75 | 150 | APS12200 或 APS12210 | ||
| A1203 | 95 | -95 | 190 | APS12210 | ||
| A1205 | 50 | -50 | 55 | APS12200 或 A1250 | ||
| 锁存 | A1210 | 150 | -150 | 300 | A1222 | |
| A1211 | 180 | -180 | 360 | APS12230 | ||
| A1212 | 175 | -175 | 350 | APS12230 | ||
| A1213 | 200 | -200 | 400 | APS12230 | ||
| A1214 | 300 | -300 | 600 | APS12230 |
总结
与连续时间器件产品相比,稳定斩波器件有诸多优势。通常,与连续时间器件相比,稳定斩波器件具有更优越的温度稳定性,物理应力耐受能力(低开关点漂移)以及更简化的生产流程。由于无需校准和更加现代化的晶圆制造工艺使用,稳定斩波器件通常还有晶片尺寸小的优点。其时域性能会出现轻微平衡,但在大多实际应用中可忽略不计。
所有 Allegro 的最新传感器产品都是斩波稳定型。我们推荐在所有新型设计都采用稳定斩波器件。时间连续器件较短的通电时间和逐步减少的输出延迟通常都无关紧要。连续时间器件仍在生产,但只在一些特定应用中推荐使用。如,
- 通过开关电源供给来控制电源传感器的应用,在这些应用中连续时间器件有着更短的通电时间。
- 极高速应用需要超高工作频率和绝对低抖动 / 最低重复性,因为其没有多次斩波行为产生额外延迟和抖动。
如果您的应用属于以上几种,请咨询当地 Allegro 现场应用工程师,确认连续时间器件是否是您设计的最佳选择。